

- Home
- INTERMEDIATE ALGEBRA
- Course Syllabus for Algebra I
- Mid-Plains Community College
- FRACTION OF A WHOLE NUMBER
- Systems of Linear Equations
- MATH FIELD DAY
- Course Outline for Finite Mathematics
- Calculus
- Algebra Final Examination
- Math 310 Exam #2
- Review of Trigonometric Functions
- Math 118 Practice test
- Precalculus Review
- Section 12
- Literal Equations
- Calculus Term Definitions
- Math 327A Exercise 2
- Public Key Algorithms II
- Maximizing Triangle Area
- Precalculus I Review for Midterm
- REVIEW OF A FIRST COURSE IN LINEAR ALGEBRA
- Math 6310 Homework 5
- Some Proofs of the Existence of Irrational Numbers
- ALGEBRAIC PROPERTIES OF MATRIX OPERATIONS
- Math 142 - Chapter 2 Lecture Notes
- Math 112 syllabus
- Math 371 Problem Set
- Complex Numbers,Complex Functions and Contour Integrals
- APPLICATIONS OF LINEAR EQUATIONS
- Week 4 Math
- Fractions
- Investigating Liner Equations Using Graphing Calculator
- MATH 23 FINAL EXAM REVIEW
- Algebra 1
- PYTHAGOREAN THEOREM AND DISTANCE FORMULA
- Georgia Performance Standards Framework for Mathematics - Grade 6
- Intermediate Algebra
- Introduction to Fractions
- FACTORINGS OF QUADRATIC FUNCTIONS
- Elementary Algebra Syllabus
- Description of Mathematics
- Integration Review Solutions
- College Algebra - Applications
- A Tip Sheet on GREATEST COMMON FACTOR
- Syllabus for Elementary Algebra
- College Algebra II and Analytic Geometry
- Functions
- BASIC MATHEMATICS
- Quadratic Equations
- Language Arts, Math, Science, Social Studies, Char
- Fractions and Decimals
- ON SOLUTIONS OF LINEAR EQUATIONS
- Math 35 Practice Final
- Solving Equations
- Introduction to Symbolic Computation
- Course Syllabus for Math 935
- Fractions
- Fabulous Fractions
- Archimedean Property and Distribution of Q in R
- Algebra for Calculus
- Math112 Practice Test #2
- College Algebra and Trigonometry
- ALGEBRA 1A TASKS
- Description of Mathematics
- Simplifying Expressions
- Imaginary and Complex Numbers
- Building and Teaching a Math Enhancement
- Math Problems
- Algebra of Matrices Systems of Linear Equations
- Survey of Algebra
- Approximation of irrational numbers
- More about Quadratic Functions
- Long Division
- Algebraic Properties of Matrix Operation
- MATH 101 Intermediate Algebra
- Rational Number Project
- Departmental Syllabus for Finite Mathematics
- WRITTEN HOMEWORK ASSIGNMENT
- Description of Mathematics
- Rationalize Denominators
- Math Proficiency Placement Exam
- linear Equations
- Description of Mathematics & Statistics
- Systems of Linear Equations
- Algebraic Thinking
- Study Sheets - Decimals
- An Overview of Babylonian Mathematics
- Mathematics 115 - College Algebra
- Complex Numbers,Complex Functions and Contour Integrals
- Growing Circles
- Algebra II Course Curriculum
- The Natural Logarithmic Function: Integration
- Rational Expressions
- QUANTITATIVE METHODS
- Basic Facts about Rational Funct
- Statistics
- MAT 1033 FINAL WORKSHOP REVIEW
- Measurements Significant figures
- Pre-Calculus 1
- Compositions and Inverses of Functions
Systems of Linear Equations
A system of equations is a collection of 2 or more
equations each containing 1 or more
variables. A system of linear equations has equations of the form a1x1+a2x2+· ·
·+anxn = b.
• A solution consists of values for the variables that
satisfy (are solutions of) each
equation in the system. Solving the system of equations requires finding the
solution
set, which is the set of all such solutions.
• A system of equations is called consistent if it has one or more solutions;
otherwise
it is called inconsistent.
• A system of equations is called independent if it has exactly one solution and
dependent
if it has more than one solution.
* System of Two Linear Equations in Two Variables
ax + by = h
cx + dy = k
with variables x and y, coefficients a, b, c and d, and constants h and k.
*Graphing Method
The graph of each equation is a line. There are three possible scenarios for
the solution set.
1. One Solution - lines intersect at a point (consistent, independent)
2. No Solutions - lines are parallel (inconsistent)
3. Infinitely Many Solutions - lines coincide (consistent, dependent)
*Substitution Method
Pick one equation and solve for one variable in terms of the other. Substitute
result into the other equation and solve resulting linear equation in one
variable.
Substitute result back into result from first step and solve for the second
variable.
*Elimination Method
Elimination by addition involves the replacement of systems of equations with
simpler equivalent systems, by performing appropriate operations, until
obtaining
a system with an obvious solution. This method is very important
because it is readily generalized to higher-order systems.
Operations that transform a system of equations into an equivalent system
include:
1. Interchanging two equations
2. Multiplying an equation by a nonzero constant
3. Adding a constant multiple of one equation to another
*Matrices
The system of equations
ax + by = h
cx + dy = k
can be represented without writing the symbols for the variables as an augmented
matrix.
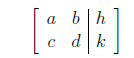
A matrix is a rectangular array of numbers written within
brackets. Each
number in a matrix is called an element. If a matrix has m rows and n
columns, it is called an m × n matrix. The element in the ith row and jth
column of matrix A is denoted aij.
Operations that transform an augmented matrix into a row-equivalent matrix
include:
1. Interchanging two rows (Ri <--> Rj)
2. Multiplying a row by a nonzero constant (kRi --> Ri)
3. Adding a constant multiple of one row to another (kRj + Ri
--> Ri)
Note: The arrow means “replace”.
Solving System: The system of equations represented by an augmented
matrix can be solved by transforming it into one of the following forms where
where m, n, and p are real numbers.
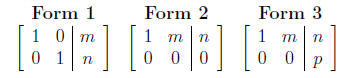
Form 1 - The system has an obvious unique solution.
Form 2 - The system has infinitely many solutions.
Form 3 - The system has no solution.
*Solving Linear Systems of Any Size
Any system of linear equations must have exactly one solution, no solution, or
infinitely many solutions.
*Gauss-Jordan Elimination
1. Choose the leftmost nonzero column and use appropriate row operations
to get a 1 at the top.
2. Use multiples of the row containing the 1 from step 1 to get zeros in all
remaining places in the column containing this 1.
3. Repeat step 1 using the submatrix formed using only rows below the row
used in step 2.
4. Repeat step 2 with the entire matrix and continue until it is impossible
to go further.
If at any point, a row is obtained with all zeros to the left of the vertical
line,
and a nonzero to the right, stop because there is no solution.
If the number of leftmost 1’s in the resulting matrix is less than the number of
variables in the system and there are no contradictions, then the system has
infinitely many solutions.
*Systems of Linear Inequalities in Two Variables
*Graphing
• a vertical line divides a plane into left and right half-planes
• a non-vertical line divides a plane into upper and lower half-planes
• For an inequality Ax + By < C, Ax + By ≤C, Ax + By > C, or
Ax + By ≥C with B ≠ 0, the graph is either the lower or upper halfplane
(but not both) determined by the line Ax + By = C.
Steps to Graph Inequality in Two Variables
1. Graph the line Ax + By = C as a dashed line if equality is not
included in the original statement (< or >), or as a solid line if
equality is included ( ≤or≥ ).
2. Choose a test point anywhere in the plane not on the line and
substitute the coordinates into the inequality. (Hint: A common
test point is (0,0) because it is easy to evaluate.)
3. If the inequality is satisfied by the point, the graph is the half-plane
that includes the test point, otherwise, the graph is the half-plane
that does not include the test point.
• For the inequality Ax < C or Ax > C, the graph is either the left or
right half-plane (but not both) determined by the line Ax = C.
*Solving
• Graphical solution is to find the intersection of the graphs of all equations
in the system, called the solution region or feasible region.
• A corner point of a solution region is the intersection of two boundary
lines.
• The inequalities x ≥0 and y ≥0, called nonnegative restrictions, occur
frequently in applications involving systems in which x and y cannot
be negative.
• A solution region is bounded if it can be enclosed with a circle.
• A solution region is unbounded if it cannot be enclosed with a circle.